
触觉感知是人类感知世界的基本信息。而触觉传感在提高机器人机械手的规划和控制性能方面发挥着重要作用,从而实现复杂的机器人操作。
尽管已经有各种方法来实现触觉传感器,但视觉-触觉传感器正在成为实现触觉传感器的一种实用手段,因为视觉是提供丰富信息的低成本且有效的来源。近年来,由于视觉信息处理的重大进展,利用视觉构建触觉传感器已成为研究界的主要领域之一。
重庆大学自动化学院的一个研究团队最近进行的一项研究提出了一个框架,用于构建用于机器人操作任务的低成本、单目视觉触觉传感器。此外,他们还介绍了一种估计接触位置的方法。该设计成本低,可在很短的时间内完成加工,适合在实验室作为探索性研究使用。该论文发表在CyborgandBionicSystems杂志上。
目前,主要的视觉触觉传感器原理可以分为基于标记的视觉触觉传感器(MVTS)和基于逆向传感的视觉触觉传感器(RSVTS)。
MVTS结构简单,没有严格的光源要求,因此非常容易搭建。它的准确性主要取决于标记的密度和相机可以识别标记的最小分辨率。为了便于检测,通常采用球形标记。关键是标记的设计和每个标记的空间位置的获取。
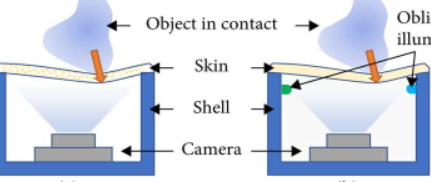
RSVTS由于采用逆向传感技术,可以充分利用相机的全部像素,获得弹性层变形的高分辨率图像。由于此类设备需要不受干扰的照明系统,因此此类设备中的相机和灯通常被封闭在室内环境中。
虽然RSVTS有助于实现高精度测量,但对照明系统、弹性层和定制传感元件的要求仍然使得这些设计的复制成本很高。因此,本文的动机是为设计低成本、易于构建的基于标记的视觉触觉传感器提供一个框架。
为保证所设计的视觉触觉传感器成本低廉、易于构建,需要尽可能减少传感器的组件数量,并尽可能降低每个组件的制备难度。
弹性层是所谓的“皮肤”,是物体和传感器之间发生接触的地方。一旦物体压在弹性层上,就会发生几何变形。相机是核心部件,用于通过捕捉到的图像的变化来感知弹性层的变形。连接器用于将弹性层与相机结合,然后将它们固定到机械手上。
弹性层是发生接触的地方。长期使用,这个部件不可避免地会磨损和老化。因此,应考虑具有耐磨性、易于制备、易于更换、成本低等特点的材料。在这项工作中,研究人员使用硅树脂作为弹性层材料。
为了准备弹性层,我们提出以下流程:步骤1:设计模具。模具的形状决定了弹性层的形状。第二步:设计标记。标记会影响变形检测的性能。第三步:制作弹性层。将经过配料、混合、去除气泡、固化等一系列工艺,得到所需的弹性层。
完成整体设计后,该团队开始进行案例研究,他们将弹性层设计为手指形状,长度和大小与人类手指的远端和中部指骨相似。随着机器人手指的安装,整个指尖都可以感知触觉信息。
为使弹性层的形状尽可能简单,传感器表面设计为半球体和开放圆柱体的联合结构。弹性层上的标记可以是圆顶或球坐标的形式。
为了制备弹性层,模具由铝制成。弹性层的厚度由模具的内径和外径决定,在这种情况下,模具A的直径为8.0,模具B的直径分别为10.0和12.0。研究人员使用真空干燥箱和称重秤使制备过程准确且可重复。
作者3D打印了一个连接器,将弹性层与相机集成在一起。
该团队还提出了一种基于标记的方法,使用可以同时检测多个接触区域的ARUCO标记来估计接触位置。
目前的工作取得了许多令人鼓舞的成果,但视觉触觉传感器在以下方面仍有改进空间:(1)与非VTS相比,VTS通常易于制造,但照明系统、弹性层和定制的传感组件仍然使这些设计的复制成本高昂。(2)大多数VTS采用平坦的接触面,这使得它们的竞争力不如非VTS同行。
这种视觉-触觉传感器的主要优点如下:首先,它支持曲面接触面,适应更复杂的物体形状。其次,透明外壳设计可以充分利用视觉传感器的图像信息。
展望未来,该团队将专注于通过设计特殊的标记图案来进一步提高触觉感知的分辨率。他们还旨在探索此类传感器在家庭服务等应用中的使用。