
人类一直对不同于他们的尺度着迷,从恒星、行星和星系等巨大物体到微小的世界:昆虫、细菌、病毒和其他微观物体。虽然显微镜可以让我们观察和观察微观世界,但仍然很难直接与之互动。
然而,人机交互技术可能会改变这一切。例如,微型机器人可以在比我们小得多的范围内与环境交互。微传感器已被用于测量昆虫在飞行或行走等活动期间施加的力。迄今为止,大多数研究只关注测量昆虫的行为,而不是直接的昆虫-微传感器相互作用。
在这种背景下,日本立命馆大学的研究人员现在开发了一种柔软的微型机器人手指,可以更直接地与微观世界互动。这项由小西聪教授领导的研究发表在《科学报告》上。
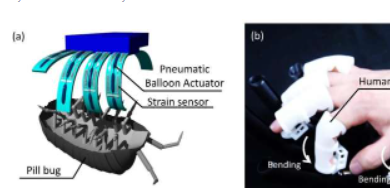
“触觉小指是通过使用液态金属柔性应变传感器实现的。软气动气球致动器充当人造肌肉,允许传感器的控制和手指状运动。使用机器人手套,人类用户可以直接控制小指.这种系统允许与昆虫和其他微观物体进行安全互动,”小西教授解释说。
研究小组使用他们新开发的微型机器人装置,研究了作为昆虫代表性样本的药虫的反应力。使用抽吸工具将药丸虫固定在适当的位置,并使用微指施加力并测量虫子腿的反作用力。
从药虫腿测得的反作用力约为10mN(毫牛顿),这与之前的估计值一致。虽然是一项具有代表性的研究和概念验证,但这一结果显示了实现人类与微观世界直接互动的巨大希望。此外,它甚至可以在增强现实(AR)技术中得到应用。使用机器人手套和微手指等微传感工具,可以实现许多涉及微尺度人与环境交互的AR技术。
“通过我们的应变感应微指,我们能够直接测量药丸虫的腿和躯干的推动运动和力量——这在以前是不可能实现的。我们预计我们的结果将导致进一步的技术发展小指与昆虫的相互作用,导致人类与环境的相互作用在更小的范围内,”小西教授评论道。