
哥伦比亚大学的三位研究人员开发了一种基于发夹技术的非常简单、小巧的软体机器人。ZechenXiong、YufengSu和HodLipson在arXiv上写了一篇论文,描述了他们的机器人设计背后的想法和他们建造的两个机器人。
随着科学家们不断寻找新的方法来建造小型软体机器人,他们经常转向现有的动物或其他能够最大限度地简化和提高能源效率的设备。在这项新的努力中,研究人员和许多其他人一样注意到,某种发夹可以以两种状态之一存在——以一种方式或另一种方式弯曲;在两种状态之间移动需要很少的能量,而且发生得很快。受到设计简单性的启发,他们创造了机器人的基础。
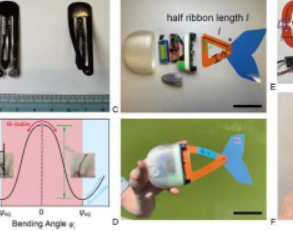
基本设计包括将一块扁平的、可弯曲的塑料片切割成夸张的C形。然后他们将塑料片的两个开口端拉近,并将它们固定在一起。这就是模拟发夹所需要的全部。接下来,他们安装了一个小型电机,以将通常由手指施加到发夹上的压力施加到发夹上。使用少量电力,伺服电机可以将塑料推入其中一种形状,而且速度与发夹一样快。
接下来,研究人员添加了脚状附肢来完成他们的机器人。使用电机在状态之间推动框架来回推动脚,使机器人能够在坚硬的表面上行走。测试表明它能够以313毫米/秒的最高速度行走,这大约相当于每秒1.6个身体长度。他们还将他们的框架塑造成一个像鱼一样的机器人,并发现它可以以大约435毫米/秒的速度穿过水面,这相当于每秒大约两倍的身体长度。研究人员声称这两种速度都比其他类似的机器人更快。
研究人员计划在今年的机器人与自动化国际会议上展示他们的机器人。